Go to the source code of this file.
Data Structures | |
| struct | bj_mat3x3 |
| struct | bj_mat3x2 |
| struct | bj_mat4x4 |
| struct | bj_mat4x3 |
Macros | |
| #define | BJ_M3(c, r) |
| #define | BJ_M32(c, r) |
| #define | BJ_M4(c, r) |
| #define | BJ_M43(c, r) |
Functions | |
| static void | bj_mat3_set_identity (struct bj_mat3x3 *restrict M) |
| static void | bj_mat3_copy (struct bj_mat3x3 *restrict dst, const struct bj_mat3x3 *restrict src) |
| static struct bj_vec3 | bj_mat3_row (const struct bj_mat3x3 *restrict M, int r) |
| static struct bj_vec3 | bj_mat3_col (const struct bj_mat3x3 *restrict M, int c) |
| static void | bj_mat3_transpose (struct bj_mat3x3 *restrict out, const struct bj_mat3x3 *restrict A) |
| static void | bj_mat3_add (struct bj_mat3x3 *restrict out, const struct bj_mat3x3 *restrict A, const struct bj_mat3x3 *restrict B) |
| static void | bj_mat3_sub (struct bj_mat3x3 *restrict out, const struct bj_mat3x3 *restrict A, const struct bj_mat3x3 *restrict B) |
| static void | bj_mat3_mul_scalar (struct bj_mat3x3 *restrict out, const struct bj_mat3x3 *restrict A, bj_real k) |
| static void | bj_mat3_mul (struct bj_mat3x3 *restrict out, const struct bj_mat3x3 *restrict A, const struct bj_mat3x3 *restrict B) |
| static struct bj_vec3 | bj_mat3_transform_vec3 (const struct bj_mat3x3 *restrict M, struct bj_vec3 v) |
| static struct bj_vec2 | bj_mat3_transform_point (const struct bj_mat3x3 *restrict M, struct bj_vec2 p) |
| static void | bj_mat3_set_translation (struct bj_mat3x3 *restrict M, bj_real tx, bj_real ty) |
| static void | bj_mat3_translate (struct bj_mat3x3 *restrict M, bj_real tx, bj_real ty) |
| static void | bj_mat3_set_scaling_xy (struct bj_mat3x3 *restrict M, bj_real sx, bj_real sy) |
| static void | bj_mat3_set_shear_xy (struct bj_mat3x3 *restrict M, bj_real shx, bj_real shy) |
| static void | bj_mat3_set_rotation_z (struct bj_mat3x3 *restrict M, bj_real angle) |
| static bj_real | bj_mat3_determinant (const struct bj_mat3x3 *restrict A) |
| static bj_bool | bj_mat3_invert (struct bj_mat3x3 *restrict out, const struct bj_mat3x3 *restrict A) |
| static void | bj_mat3_invert_unsafe (struct bj_mat3x3 *restrict out, const struct bj_mat3x3 *restrict A) |
| static void | bj_mat3_set_ortho (struct bj_mat3x3 *restrict M, bj_real l, bj_real r, bj_real b, bj_real t) |
| static void | bj_mat3_set_viewport (struct bj_mat3x3 *restrict M, bj_real x, bj_real y, bj_real w, bj_real h) |
| static void | bj_mat3x2_set_identity (struct bj_mat3x2 *restrict M) |
| static void | bj_mat3x2_set_translation (struct bj_mat3x2 *restrict M, bj_real tx, bj_real ty) |
| static void | bj_mat3x2_set_scaling_xy (struct bj_mat3x2 *restrict M, bj_real sx, bj_real sy) |
| static void | bj_mat3x2_set_rotation_z (struct bj_mat3x2 *restrict M, bj_real angle) |
| static void | bj_mat3x2_mul (struct bj_mat3x2 *restrict out, const struct bj_mat3x2 *restrict A, const struct bj_mat3x2 *restrict B) |
| static struct bj_vec2 | bj_mat3x2_transform_point (const struct bj_mat3x2 *restrict M, struct bj_vec2 p) |
| static struct bj_vec2 | bj_mat3x2_transform_dir (const struct bj_mat3x2 *restrict M, struct bj_vec2 v) |
| static void | bj_mat3_from_mat3x2 (struct bj_mat3x3 *restrict M, const struct bj_mat3x2 *restrict A) |
| static void | bj_mat3x2_from_mat3 (struct bj_mat3x2 *restrict M, const struct bj_mat3x3 *restrict A) |
| static void | bj_mat4_set_identity (struct bj_mat4x4 *restrict M) |
| static void | bj_mat4_copy (struct bj_mat4x4 *restrict dst, const struct bj_mat4x4 *restrict src) |
| static struct bj_vec4 | bj_mat4_row (const struct bj_mat4x4 *restrict M, int r) |
| static struct bj_vec4 | bj_mat4_col (const struct bj_mat4x4 *restrict M, int c) |
| static void | bj_mat4_transpose (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict A) |
| static void | bj_mat4_add (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict A, const struct bj_mat4x4 *restrict B) |
| static void | bj_mat4_sub (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict A, const struct bj_mat4x4 *restrict B) |
| static void | bj_mat4_mul_scalar (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict A, bj_real k) |
| static void | bj_mat4_scale_axes (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict A, bj_real sx, bj_real sy, bj_real sz) |
| static void | bj_mat4_mul (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict A, const struct bj_mat4x4 *restrict B) |
| static struct bj_vec4 | bj_mat4_transform_vec4 (const struct bj_mat4x4 *restrict M, struct bj_vec4 v) |
| static void | bj_mat4_set_translation (struct bj_mat4x4 *restrict M, bj_real x, bj_real y, bj_real z) |
| static void | bj_mat4_translate (struct bj_mat4x4 *restrict M, bj_real x, bj_real y, bj_real z) |
| static void | bj_mat4_set_outer_product (struct bj_mat4x4 *restrict out, struct bj_vec3 a, struct bj_vec3 b) |
| static void | bj_mat4_rotate_axis_angle (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict M, struct bj_vec3 axis, bj_real angle) |
| static void | bj_mat4_rotate_x (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict M, bj_real a) |
| static void | bj_mat4_rotate_y (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict M, bj_real a) |
| static void | bj_mat4_rotate_z (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict M, bj_real a) |
| static void | bj_mat4_rotate_arcball (struct bj_mat4x4 *restrict R, const struct bj_mat4x4 *restrict M, struct bj_vec2 a, struct bj_vec2 b, bj_real s) |
| static bj_bool | bj_mat4_invert (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict M) |
| static void | bj_mat4_invert_unsafe (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict M) |
| static void | bj_mat4_orthonormalize (struct bj_mat4x4 *restrict out, const struct bj_mat4x4 *restrict A) |
| static void | bj_mat4_set_frustum (struct bj_mat4x4 *restrict M, bj_real l, bj_real r, bj_real b, bj_real t, bj_real n, bj_real f) |
| static void | bj_mat4_set_ortho (struct bj_mat4x4 *restrict M, bj_real l, bj_real r, bj_real b, bj_real t, bj_real n, bj_real f) |
| static void | bj_mat4_set_perspective (struct bj_mat4x4 *restrict M, bj_real y_fov, bj_real aspect, bj_real n, bj_real f) |
| static void | bj_mat4_set_viewport (struct bj_mat4x4 *restrict M, bj_real x, bj_real y, bj_real w, bj_real h) |
| static void | bj_mat4_set_lookat (struct bj_mat4x4 *restrict M, struct bj_vec3 eye, struct bj_vec3 center, struct bj_vec3 up) |
| static void | bj_mat4x3_set_identity (struct bj_mat4x3 *restrict M) |
| static void | bj_mat4x3_set_translation (struct bj_mat4x3 *restrict M, bj_real tx, bj_real ty, bj_real tz) |
| static void | bj_mat4x3_set_scaling_xyz (struct bj_mat4x3 *restrict M, bj_real sx, bj_real sy, bj_real sz) |
| static void | bj_mat4x3_set_rotation_x (struct bj_mat4x3 *restrict M, bj_real a) |
| static void | bj_mat4x3_set_rotation_y (struct bj_mat4x3 *restrict M, bj_real a) |
| static void | bj_mat4x3_set_rotation_z (struct bj_mat4x3 *restrict M, bj_real a) |
| static void | bj_mat4x3_mul (struct bj_mat4x3 *restrict out, const struct bj_mat4x3 *restrict A, const struct bj_mat4x3 *restrict B) |
| static struct bj_vec3 | bj_mat4x3_transform_point (const struct bj_mat4x3 *restrict M, struct bj_vec3 p) |
| static struct bj_vec3 | bj_mat4x3_transform_dir (const struct bj_mat4x3 *restrict M, struct bj_vec3 v) |
| static void | bj_mat4_from_mat4x3 (struct bj_mat4x4 *restrict M, const struct bj_mat4x3 *restrict A) |
| static void | bj_mat4x3_from_mat4 (struct bj_mat4x3 *restrict M, const struct bj_mat4x4 *restrict A) |
Detailed Description
Matrix types and operations for 2D and 3D transforms.
Four matrix shapes, all backed by a plain bj_real m[N] array:
| Type | Shape | Typical use |
|---|---|---|
| bj_mat3x3 | 3×3 | 2D homogeneous (projective) transforms |
| bj_mat3x2 | 3×2 | 2D affine transforms (no projective term) |
| bj_mat4x4 | 4×4 | 3D homogeneous transforms, projection matrices |
| bj_mat4x3 | 4×3 | 3D affine transforms (no projective term) |
Storage is column-major. Element (row r, column c) lives at m[col * height + row], accessed via the BJ_M3 / BJ_M32 / BJ_M4 / BJ_M43 index macros. This matches the convention used by OpenGL and most graphics math libraries, so matrices can be uploaded to a GPU verbatim if you ever wire one in.
Vectors are columns; multiply on the right. res = M * v means M.transform(v). Composition reads right-to-left: M = T * R * S applies S first, then R, then T.
What's here per matrix size: identity, copy, row/column extraction, transpose, component-wise arithmetic, scalar multiplication, matrix product, matrix-vector transform, translation and scaling constructors, axis rotations, inversion (safe and unsafe), and the common projection / viewport / look-at helpers.
Safe vs unsafe inversion. The *_invert functions check the determinant via bj_real_is_zero and return BJ_FALSE (leaving out unspecified) on singular input. The *_invert_unsafe variants skip the check; passing a singular matrix produces undefined results. Cofactor-based inversion is also numerically fragile for ill-conditioned matrices: prefer affine or orthonormal specialisations when the structure is known.
- See also
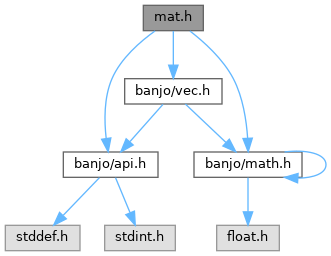
- vec.h for the vector types these matrices act on, quat.h for orientation as quaternions (with conversions to and from bj_mat4x4).
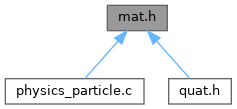
Definition in file mat.h.